I am currently a master’s student in Data Science at New York University.
I am interested in Multimodal Representation Learning, Continual Learning, Embodied AI and Robot Learning (Reinforcement & Imitation Learning).
I like gaming 🎮, badminton 🏸, climbing 🧗♂️ and hiking 🏔️ !
And I have Frosty — the cutest little cat ever :33333333
🚧 Ongoing Projects
SMRL: Streaming Multimodal Representation Learning
Implicit Task Affordance Prediction in 3D Space
📝 Publications
Fully Spiking Neural Network for Legged Robots
Xiaoyang Jiang, Qiang Zhang, Jingkai Sun, Jiahang Cao, Jingtong Ma, Renjing Xu
- In this paper, we successfully apply a lightweight population coded Spiking Neural Network (SNN) to process legged robots, achieving outstanding results across a range of simulated terrains. This study presents a highly efficient SNN for legged robots that can be seamless integrated into other learning models.
- Paper accepted for oral presentation at ICASSP 2025.
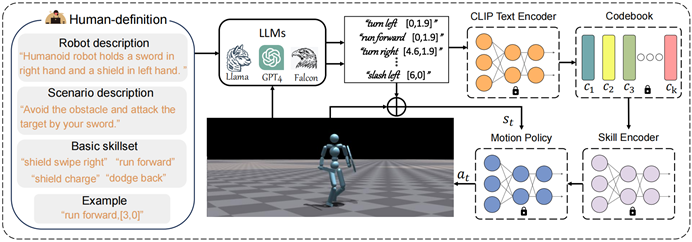
Prompt, Plan, Perform: LLM-based Humanoid Control via Quantized Imitation Learning
Jingkai Sun, Qiang Zhang, Yiqun Duan, Xiaoyang Jiang, Chong Cheng, Renjing Xu
- We present a novel approach that combines adversarial imitation learning with large language models (LLMs). This innovative method enables the agent to learn reusable skills with a single policy and solve zero-shot tasks under the guidance of LLMs. To the best of our knowledge, this is the first framework that controls humanoid robots using a single learning policy network and LLM as a planner.
- Accepted at ICRA 2024.
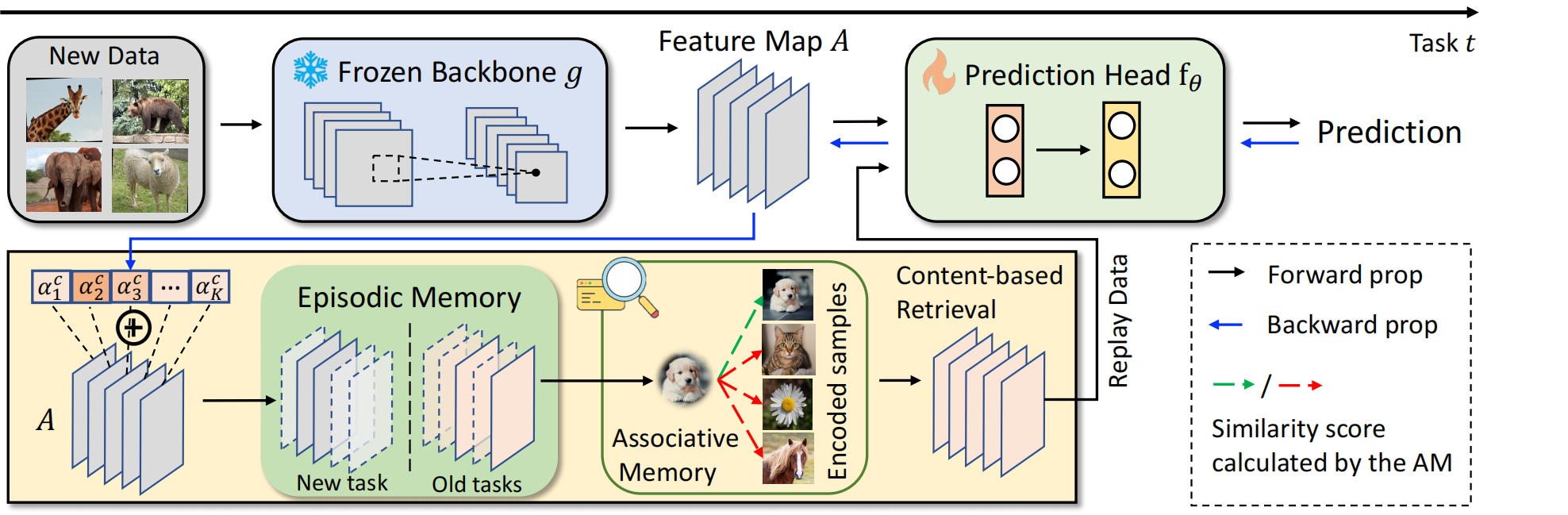
Saliency-Guided Hidden Associative Replay for Continual Learning
Guangji Bai, Qilong Zhao, Xiaoyang Jiang, Yifei Zhang, Liang Zhao
- This paper presents the Saliency Guided Hidden Associative Replay for Continual Learning. SHARC primarily archives salient data segments via sparse memory encoding. Importantly, by harnessing associative memory paradigms, it introduces a content focused memory retrieval mechanism, promising swift and near-perfect recall, bringing CL a step closer to authentic human memory processes.
- Accepted at NeurIPS 2023 Workshops.
🎖 Honors and Awards
- 2020 - 2024 Excellent Student Scholarship granted by Northeastern University
- 2022.06 Silver Prize in Liaoning in China College Students’ Internet Plus Innovation and Entrepreneurship Competition held by the Ministry of Education
- 2022.04 National Third Prize in the Underwater Operations Program in China Robot Contest co-held by China Association of Automation and Chinese RoboCup Committee
- 2020.08 First Prize in the RoboMaster University Championship and First Prize in the RoboMaster Infantry Racing and Intelligent Shooting programs, funded and organized by DJI
📖 Educations
- 2024.09 - 2026.05 (now), M.S. in Data Science, Center for Data Science, New York University.
- 2020.09 - 2024.07, B.Eng. in Robotics Engineering, Faculty of Robot Science and Engineering, Northeastern University.
💻 Professional Experience
- 2024.09 - now, CILVR Lab, NYU
- 2022.09 - 2024.07, Microelectronics Thrust, Function Hub, HKUST
- 2023.04 - 2023.11, Incremental Learning Group, Emory University
- 2020.08 - 2021.08, T-DT Innovation Laboratory, Northeastern University
🐈 Frosty